MR107M Совместная 6-осевая рука робота с камерой и захватным оборудованием Учебное оборудование Учебное оборудование по мехатронике
Демо, программирование роботов, высокотехнологичное оборудование для профессионального обучения. Рабочий радиус: 500 мм Несущая нагрузка: 3 кг Повторяемость: +/- 0,1 мм Управление: 12-дюймовый сенсорный экран с удобным графическим интерфейсом
Степени свободы: 6 вращающихся шарниров
Интерфейс ввода / вывода: 16 DI, 16 DO, 2 AI, 2 AO
Электрический захват: регулируемое усилие захвата 3 Н, макс. 40 Н, ход макс. 110 мм
Система камеры: Максимальное разрешение: 5 Mpx (2560 x 1920), максимальная частота изображения: 30 кадров в секунду

1. Обзор продукта
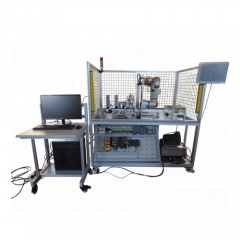
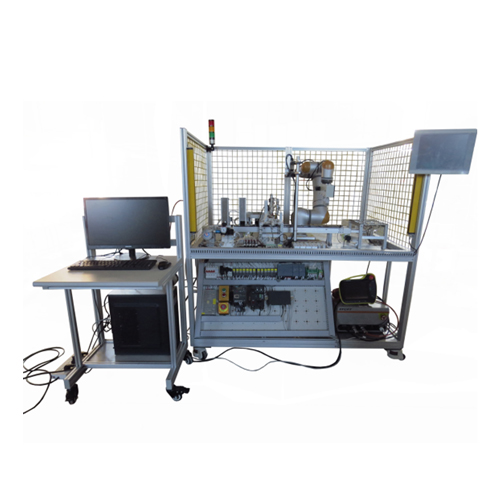
В основе этого оборудования лежат промышленные роботы и машинное зрение, оно органично объединяет механическое, пневматическое, управление движением, регулирование скорости преобразования частоты, технологию управления ПЛК, модульную структуру, легко комбинируется для быстрого обнаружения и сборки различных материалов. Чтобы облегчить практическое обучение и обучение, система была специально разработана для выполнения различных типов индивидуального обучения роботов и комплексного обучения проектам, а также для выполнения различных типов индивидуального обучения роботов и комплексного обучения проектам. Может выполняться обучение шестиосевых роботов, позиционирование, захват, сборка, хранение и другое обучение,
Он включает в себя промышленных роботов с шестью степенями свободы, интеллектуальные системы визуального контроля, системы управления ПЛК и набор механизмов подачи, транспортировки, сборки и складирования, которые могут выполнять такие операции, как сортировка, тестирование, обработка, сборка и хранение заготовок.
Все компоненты платформы устанавливаются на профильный стол. Механическая конструкция, электрическая цепь управления и привод относительно независимы и разработаны с использованием стандартных промышленных деталей. С помощью этой платформы он может быть обучен различным аспектам, таким как механическая сборка, проектирование электрических схем и проводка, программирование и отладка ПЛК, интеллектуальное визуальное редактирование процессов, программирование промышленных роботов и приложения для отладки, и подходит для профессиональных колледжей и технических школ, связанных с автоматизацией. майоры. Практические занятия по таким курсам, как «Технология управления» и «Технология автоматизации» подходят для технических специалистов по автоматизации для проведения инженерных тренингов и соревнований по квалификации.

2. Технические характеристики
1. Входная мощность: однофазная ~ 220 В ± 10% 50 Гц
2. Рабочая среда: температура -10 ℃ + 40 ℃, относительная влажность ≤85% (25 ℃), высота над уровнем моря <4000 м.
3. Мощность устройства: <1,5 кВА
4. Размер тренировочной площадки: 1500мм × 880мм × 1400мм.
5. Защита безопасности: с защитой от утечки безопасность соответствует национальным стандартам.
3. Структура и состав оборудования.
Учебная платформа состоит из промышленной роботизированной системы с шестью степенями свободы, интеллектуальной системы визуального контроля, системы программируемого контроллера (ПЛК), блока подачи, блока конвейера, блока временного хранения кормовых отходов, временного блока технологических отходов. блок хранения, узел сборки заготовок, Состоит из блока склада, различных заготовок, профильного учебного стола, профильного компьютерного стола и т. д.
1. Промышленный робот с шестью степенями свободы.
2. Интеллектуальная система визуального контроля
3. Блок программируемого контроллера Сименс.
4. Устройство подачи
5. Конвейерная установка
6. Узел сборки заготовки.
7. Складская единица
8. Временное хранение отходов.
4. Практические учебные проекты
1. Принцип, использование и отладка системы машинного зрения.
2. Принцип, использование и отладка шестиосевой промышленной робототехнической системы.
3. Калибровка и взаимное преобразование между шестиосевой системой координат промышленного робота и системой координат машинного зрения.
4. Установка и ввод в эксплуатацию интегрированных приложений промышленных роботов и систем машинного зрения.
5. Настройка, программирование и отладка шаблона системы машинного зрения.
6. Ручная отладка промышленных роботов с помощью обучающего модуля.
7. Установите и измените координаты каждой контрольной точки с помощью обучающего модуля.
8. Написание и изменение программ промышленных роботов с помощью обучающего модуля.
9. Настройка координат слежения робота.
10. Разработка программного обеспечения и программирование промышленных роботов.